┬ķ╩Ī└Ē╣ż▓®╩┐čą░l¤o╚╦ÖC ┐╔ūįäėČŃķ_šŽĄK╬’
ĪĪĪĪąĶ╚╦╣ż▓┘┐žĄ─¤o╚╦ÖCęčĮø║▄ČÓŻ¼ūįäė±{±éĄ─ģsŽÓī”▌^╔┘ĪóŪę’wąą╦┘Č╚▌^┬²ĪŻMIT į┌ūx▓®╩┐ Andrew Barry ūŅĮ³š╣╩Š┴╦╦¹Ą─░µ▒ŠŻ¼ę╗┐ŅĖ▀╦┘’wąąĄ─Īóūįäė±{±é¤o╚╦ÖCĪŻ
ĪĪĪĪ“¼F╚ńĮ±╚╦╚╦Č╝į┌ū÷¤o╚╦ÖCŻ¼Ą½ø]ėąę╗éĆų¬Ą└╚ń║╬▓┼─▄▒▄├Ō░l╔·┼÷ū▓ĪŻ”Barry ▒Ē╩ŠĪŻ
ĪĪĪĪį┌ Barry ╣½▓╝Ą─▀@Č╬ęĢŅlųąŻ¼ĮøĖ─čbĄ─¤o╚╦ÖCęį 48 km/h ┤®▀^ę╗Ų¼śõ┴ųŻ¼┐┤ŲüĒ▀Ć═”┐ņĄ─Ż¼▓óø]ėą│÷¼FŲõ╦³¤o╚╦ÖCė÷ĄĮšŽĄKĄ─“ę╗═ŻĪóČ■┐┤Īó╚²═©▀^”Ą─▀^│╠ĪŻ

ĪĪĪĪ─▄ū÷ĄĮ▀@ą®Ż¼╩Ūę“×ķ Barry ┼c╦¹Ą─Į╠╩┌ Russ Tedrake ę╗ŲįOėŗ┴╦╠ūšŽĄK╬’ęÄ▒▄ŽĄĮy Pushbroom StereoĪŻ
ĪĪĪĪ┼c¤o╚╦ÖC╔Ž│ŻęÄĄ─ęÄ▒▄ŽĄĮy▓╗═¼Ż¼Pushbroom Stereo ų╗ė^£yļx¤o╚╦ÖC 10 ├ūŠÓļxĄ─šŽĄKŻ¼Č°▓╗į┘╠Ä└ĒŲõ╦³╚ń 4Īó6Īó12 ├ūĄ╚╬╗ų├īó║÷┬į▓╗ėŗĪŻę▓Š═╩ŪšfŻ¼¤o╚╦ÖCį┌’wąąĢr“┐╝æ]”Ą─╩┬Ūķ╔┘┴╦Ż¼ę▓Š═─▄ę└┐┐▌^╚§Ą─ėŗ╦Ń─▄┴”┐ņ╦┘┼ąöÓšŽĄK╬’ĪŻō■ĘQŻ¼▀@┐ŅŽĄĮy▒╚¼FėąĄ─┐ņ 20 ▒ČĪŻ
ĪĪĪĪ┐┤ŲüĒŻ¼Barry ×ķ¤o╚╦ÖC┼õų├┴╦▀m┴┐Ą─ėŗ╦Ń─▄┴”▒ŃĮŌøQ┴╦å¢Ņ}ĪŻ╦¹Ą─¤o╚╦ÖC┼õ┴╦ā╔ēKųŪ─▄╩ųÖC╝ēäeĄ─ CPUĪóÖCęĒ╔ŽĖ„ėąę╗éĆözŽ±Ņ^Ż¼┐╔▀Mąą 120 ļ/├ļĄ─┼─özĪŻąŠŲ¼Š▐Ņ^Ė▀═©į°▓╗ų╣ę╗┤╬▒Ē╩ŠŻ¼ŽÓ«öę╗▓┐Ęų╩ųÖC╔ŽĄ─ĮM╝■║═╝╝ąg═Ļ╚½┐╔ęŲų▓ĄĮ¤o╚╦ÖC╔ŽĪŻ

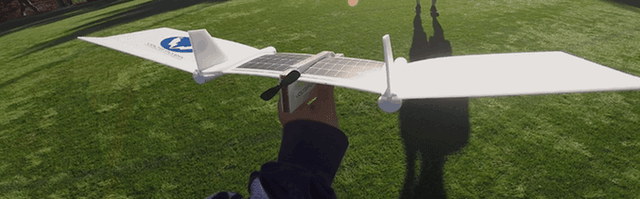
ĪĪĪĪBarry Ų┤čbĄ─¤o╚╦ÖC
ĪĪĪĪäōśI╣½╦Š Skydio ę▓į┌ķ_░lūįäė±{±éĄ─¤o╚╦ÖCŻ¼╩╣ė├ł÷Š░░³└©╩ęā╚╠Į£yĄ╚Ż¼Ą½’wąą╦┘Č╚ę¬┬²║▄ČÓĪŻ
ĪĪĪĪūįäė±{±é¤o╚╦ÖC┐┤ŲüĒ║▄├└║├Ż¼Ą½╚ń║╬▒ŻūC░▓╚½╚į╚╗Ģ■╩Ū┤¾å¢Ņ}ĪŻ╝┤╩╣╩Ū─Ūą®ėąīŻ╚╦▓┘┐žĄ─¤o╚╦ÖCŻ¼─┐Ū░╚į╚╗▓╗╠½╩▄▒O╣▄▓┐ķTŲ½É█ĪŻ
ĪĪĪĪŅ}łDüĒūįŻ║Fastcompany
ž¤ŠÄŻ║admin
ĪĪĪĪ├Ōž¤┬Ģ├„Ż║
ĪĪĪĪĘ▓▒ŠšŠ╝░ŲõūėšŠūó├„“ć°ļH┐šĖ█ą┼ŽóŠW”Ą─ĖÕ╝■Ż¼Ųõ░µÖÓī┘ė┌ć°ļH┐šĖ█ą┼ŽóŠW╝░ŲõūėšŠ╦∙ėąĪŻŲõ╦¹├Į¾wĪóŠWšŠ╗“éĆ╚╦▐D▌d╩╣ė├Ģr▒žĒÜūó├„Ż║“╬─š┬üĒį┤Ż║ć°ļH┐šĖ█ą┼ŽóŠW”ĪŻŲõ╦¹Š∙▐D▌dĪóŠÄūg╗“š¬ŠÄūįŲõ╦³├Į¾wŻ¼▐D▌dĪóŠÄūg╗“š¬ŠÄĄ──┐Ą─į┌ė┌é„▀fĖ³ČÓą┼ŽóŻ¼▓ó▓╗┤·▒Ē▒ŠšŠī”ŲõšµīŹąįžōž¤ĪŻŲõ╦¹├Į¾wĪóŠWšŠ╗“éĆ╚╦▐D▌d╩╣ė├Ģr▒žĒÜ▒Ż┴¶▒ŠšŠūó├„Ą─╬─š┬üĒį┤ĪŻ╬─š┬ā╚╚▌āH╣®ģó┐╝Ż¼ą┬┬ä╝mÕe [email protected]





![13éĆÖC┼ō▒žų¬Ī░ØōĪ▒ęÄät ┬Ā┐šĮŃĄ─įÆø]Õe](https://m.0760sms.cn/d/file/ts/2016-06-03/d79ae3930bc6864f63fb92669ffa25be.jpg)



")





")

")














